近期,我校吴玉程教授、胡颖研究员课题组在智能柔性光驱动器研究领域取得新进展。团队与中科院上海硅酸盐所王冉冉研究员、南京工业大学武观副教授等合作,发展了一种基于MXene的新型柔性智能光驱动器与软体机器人,相关研究成果以Self-Locomotive Soft Actuator Based on Asymmetric Microstructural Ti3C2TxMXene Film Driven by Natural Sunlight Fluctuation为题,在线发表在国际著名学术期刊ACS Nano上。
人工柔性驱动器能将外部能量转化为机械能,在软体机器人、人工肌肉、智能穿戴服装等领域展现了极大的应用潜力。然而,目前所研制的驱动器大多需要利用人工能量,并通过人工控制来产生连续变形,可能会增加驱动系统的复杂性,从而限制其微型化和进一步应用发展。因此,发展能够利用自然能源来产生自主运动、无需人工能源和人工控制的柔性驱动器和智能微型机器人具有重要的基础研究意义和应用价值。
针对这一难题,该研究人员采用偶联剂IPTS对MXene(Ti3C2Tx)进行修饰,增大了MXene纳米片的层间距,并采用真空抽滤的方法制备了不对称微观层状结构以及力学性能增强的独立支撑的MXene薄膜。该薄膜表现出宏观尺度的光驱动响应,在光照下可产生可逆的快速弯曲变形。在此基础上,将其与聚合物薄膜进行双层复合,研制了对自然太阳光具有超高响应的柔性双晶片结构光驱动器(图1)。该驱动器能在自然太阳光照射下产生快速的弯曲变形,变形角度可达346度。
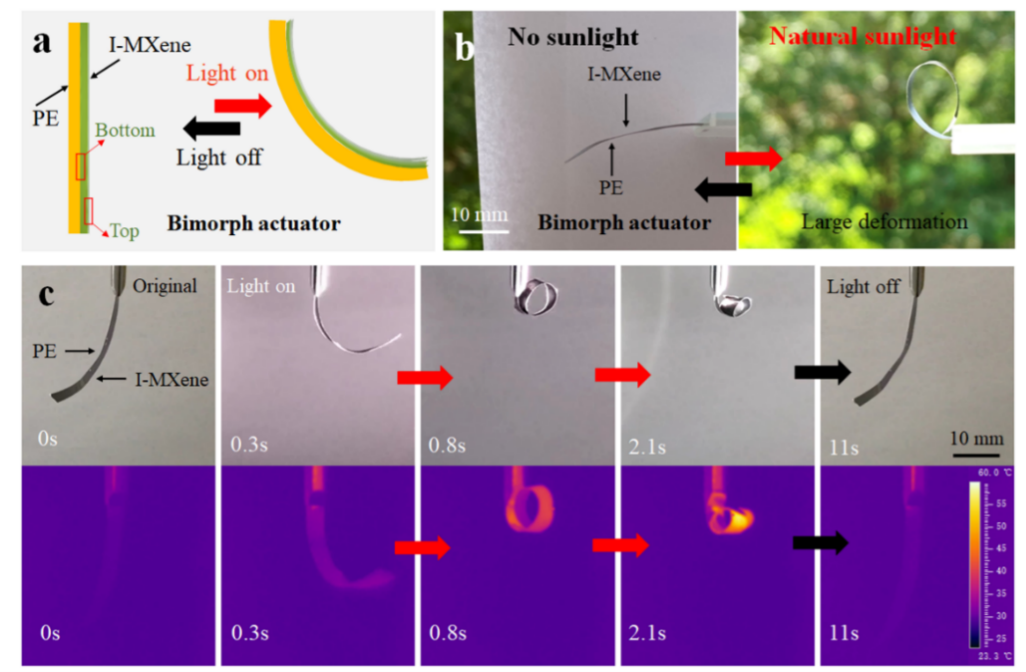
图1:柔性光驱动器在自然太阳光以及人工光源照射下的快速弯曲变形
利用该驱动器在自然阳光的光强波动下的连续弯曲变形作为机械动力源,并通过仿“尺蠖”的结构设计来将重复弯曲变形矫正为定向运动,从而构造了仿尺蠖的柔性机器人,实现了其在自然阳光照射下、无需人工能量和控制的自主定向运动(图2)。
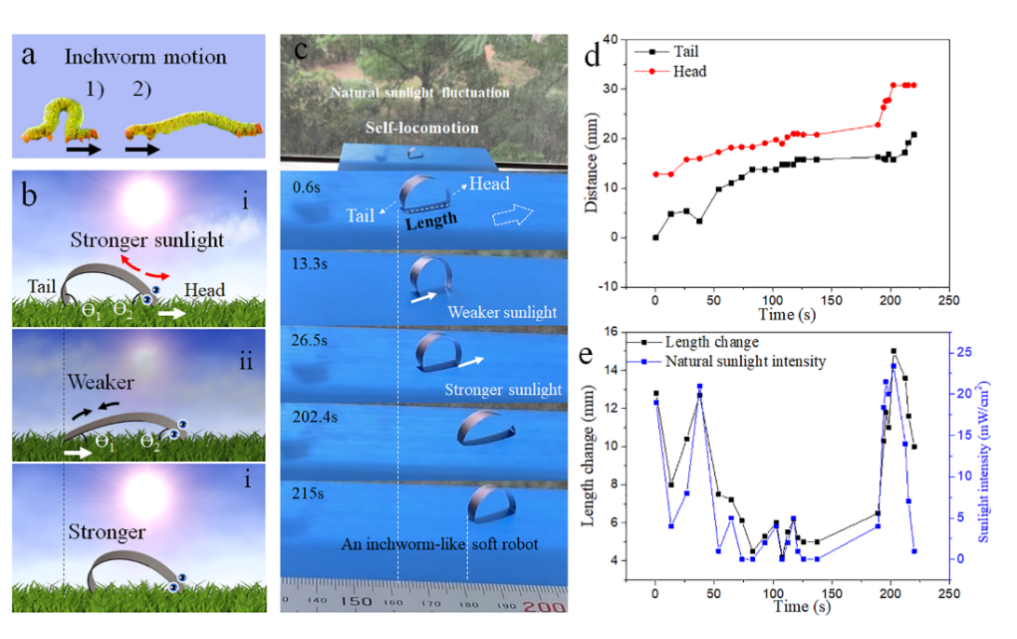
图2:仿尺蠖结构的柔性“机器人”在自然太阳照射下、无需人工控制的自主定向运动
此外,利用该驱动器还制备了能在阳光照射下举起物体的柔性臂,以及“熊猫”机器人饰品。该“熊猫”饰品可以在自然阳光照射下改变面部表情和身体动作,从沮丧的蜷缩变成快乐的手舞足蹈。在智能可穿戴应用方面,该驱动器还可用于制备可穿戴的装饰品和品牌标识,与服装相结合,在自然阳光下可产生三维变形,保护裸露的皮肤免受强烈阳光的伤害,使衣服更加智能化。
以上研究为开发自然太阳光驱动的柔性驱动器提供了一种新的设计策略,并揭示了太阳光驱动器在仿生微型软体机器人、空间智能遮阳板、太阳能驱动器件和可穿戴服装等方面的应用前景。
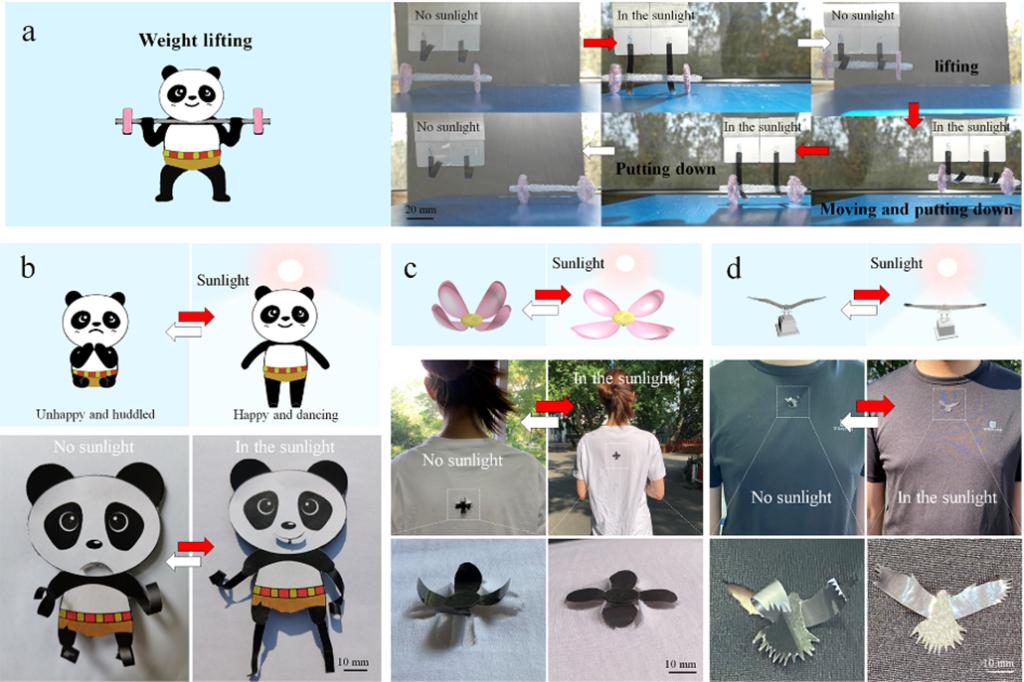
图3:采用柔性驱动器制备的可穿戴饰品,能集成到服装上,在太阳光下产生三维变形
该工作得到了国家自然科学基金、安徽省杰出青年科学基金、中央高校基本科研业务费专项资金等的资助。合肥工业大学为该论文第一署名单位,航空结构件成形制造与装备安徽省重点实验室给予论文工作大力支持。论文的通讯作者为工业与装备技术研究院胡颖研究员、中科院上海硅酸盐所王冉冉研究员与南京工业大学武观副教授,共同第一作者包括工业与装备技术研究院博士生杨露露和中科院上海硅酸盐所博士生闫秋阳。
论文链接:https://pubs.acs.org/doi/10.1021/acsnano.0c10797
(周丽华/文 胡颖/图 翟华/审核)
责任编辑:刘红平



