近日,我校胡颖研究员、常龙飞副研究员团队与赵玉顺教授合作,发展了一种静电驱动的石墨烯振荡器,并受海豹运动启发,进一步设计了一种电压/光照协同驱动的仿海豹机器人,其中石墨烯振荡器提供推进力,柔性光驱动器控制运动方向。该机器人能够在电/光刺激下实现携带物体移动、绕开障碍物等可控运动。相关成果以“Seal-Bioinspired Electrostatic Oscillation-Based Soft Robot with Light Tunable Locomotion”为题发表在《Advanced Functional Materials》上。
能够持续输出机械能的自振荡运动在生物活动中起着至关重要的作用,这启发了人们利用自振荡来设计新型柔性仿生机器人。基于自振荡运动的柔性机器人可以进行爬行、游泳等仿生运动,提高了机器人运动的性能和多样性。然而,当前的自振荡驱动器大多需要精确控制外部刺激能量。设计结构简单、可控性高的自振荡驱动器,以及在此基础上实现对柔性机器人运动的精确控制仍然是一个挑战。
海豹能在水下和地面运动。在水下,海豹主要依靠摆动后鳍来提供向前推力,并通过拍打前鳍来改变运动方向。相比之下,海豹在陆地上则主要通过自身的背腹起伏向前移动。由于缺乏后鳍连续拍打所提供的推力,海豹在地面上的移动速度相对较慢。受海豹两种运动模式的启发,团队设计了一种仿海豹柔性机器人。该机器人包含两个部分:(1)模拟海豹后鳍的石墨烯振荡器,在直流电压驱动下产生连续拍打动作,为运动提供驱动力;(2)两侧安装柔性光驱动器,模拟海豹的前鳍用于调整运动方向。
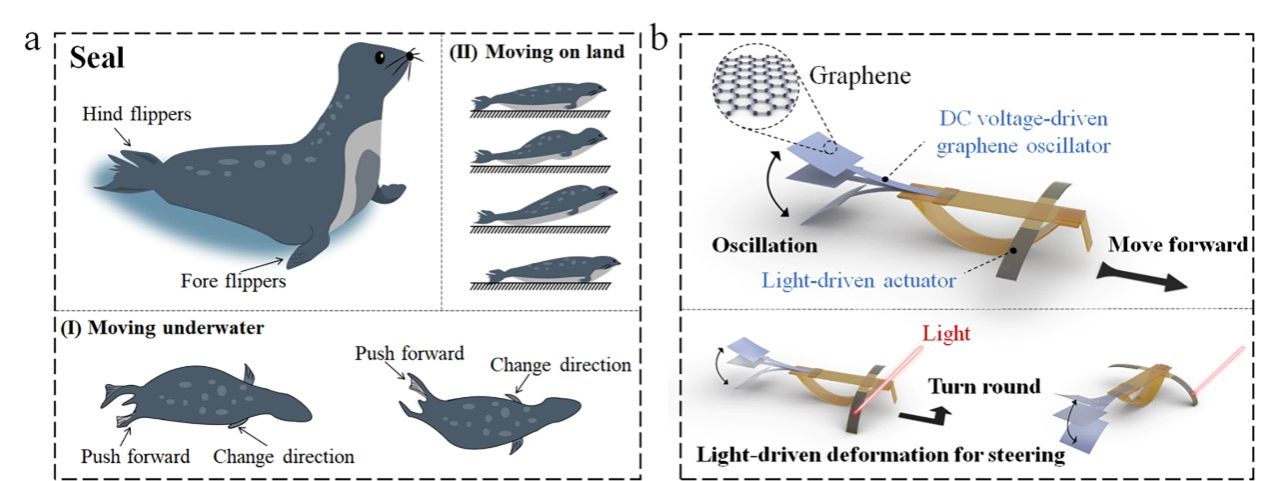
图1 (a)海豹在水中和地面的两种运动模式;(b)仿海豹运动的电/光驱动柔性机器人
该石墨烯振荡器为悬臂梁结构,放置在两平行板电极之间,一端固定,另一端自由悬挂。在电极之间施加360V的直流电压(电场强度为24 V mm−1),石墨烯薄膜在两电极之间产生了持续的弯曲振荡。其振荡运动的驱动机制归因于静电感应效应,以及荷电极性变化引起的静电力方向变化。振荡运动的频率可通过施加的电压来控制,在100Vmm−1的电场强度下,振荡频率可达10.8 Hz。
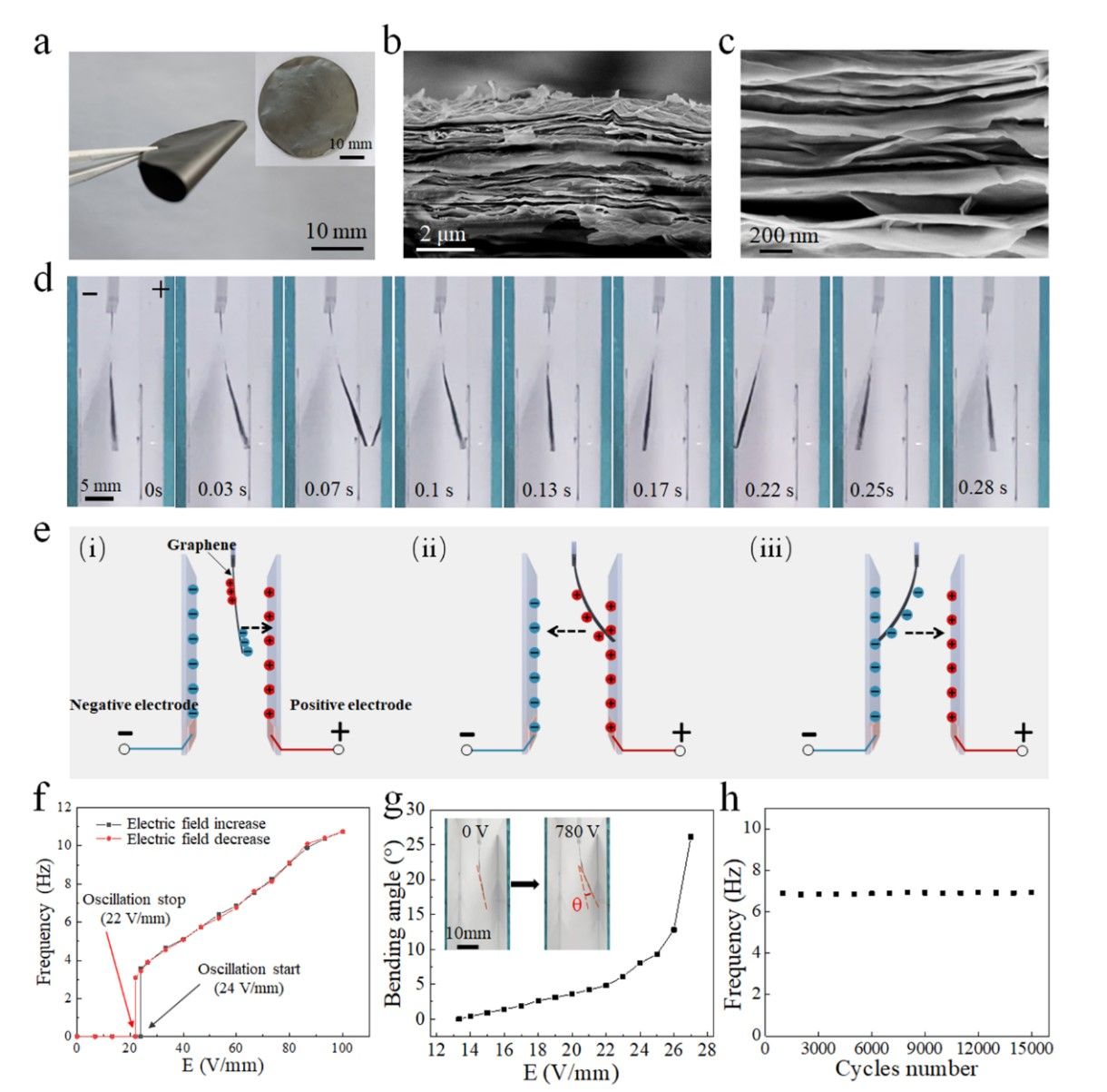
图2 静电驱动的石墨烯振荡器及其性能
基于石墨烯振荡器在直流电场下的持续振荡运动特性,可用来构建一种新型的电-机械动力系统。通过模仿海豹在水里和地面上的运动,团队设计了一种可以在电场下自主移动的仿海豹柔性机器人。该机器人以石墨烯振荡器作为后鳍,聚酰亚胺(PI)薄膜为身体。石墨烯振荡器产生的振荡运动为机器人运动提供了持续的机械动力,半圆形PI身体为机器人的运动提供了支撑点,并减少了机器人与地面之间的摩擦。与海豹在水下通过摆动后鳍向前移动类似,当施加电场时,仿海豹机器人可以通过石墨烯振荡器的往复振荡在电极板上实现自主运动。在30秒内,机器人运动了约49mm距离。该仿海豹机器人还可以携带一个约为自重5.2倍(44.6mg)的物体向前运动。这表明了该机器人在特殊场景中的潜在应用,如在狭窄的带电环境中运输物体、检测等。
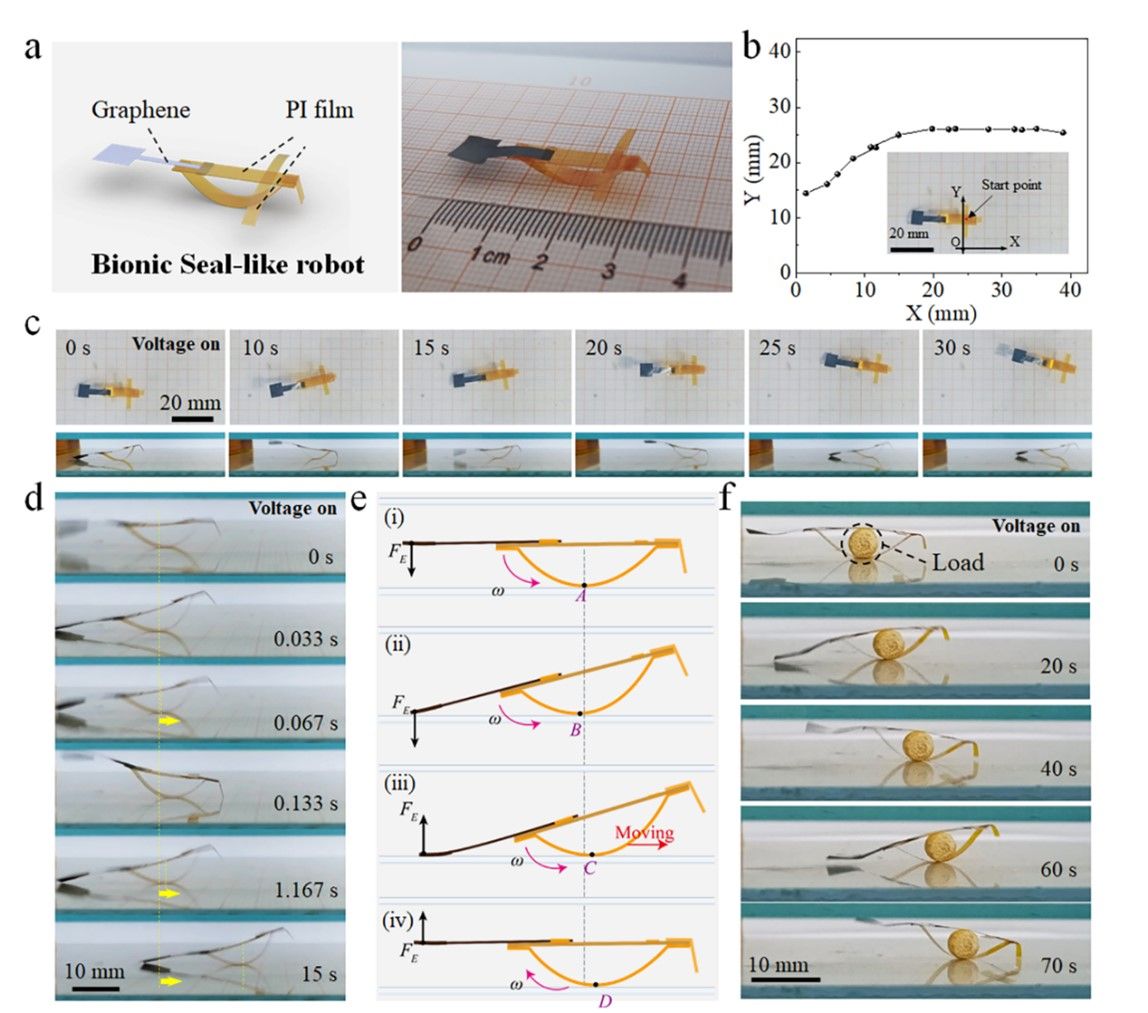
图3 以石墨烯振荡器为马达的仿海豹机器人在电场驱动下自主爬行运动,及携带物体运动
通过电场驱动的机械振荡运动,可以初步实现仿海豹机器人的自主运动。然而,仅靠振荡运动很难控制机器人的运动方向。因此,进一步引入能产生可逆变形的柔性驱动器作为仿生前鳍,来控制运动的方向。为了减少仿生前鳍的加入对机器人整体结构和运动的影响,选择了能远程操控的光驱动器来构建仿生前鳍。当施加直流电压后,石墨烯振荡器产生振荡推动机器人前进。在此过程中,外部光束照射到光驱动器上,使其变形并接触到下极板,导致移动中的机器人转向。作为验证,展示了仿海豹机器人在电压和光照的双重刺激下,以“S”轨迹绕过两个障碍物。
该石墨烯振荡器以及仿生机器人具有结构简易、机械能持续输出、可控性强等优点,有望应用于紧凑型电力设备、气体绝缘输电线路的内部运行和巡检。此外,作为一种机械输出稳定的新型电机,石墨烯振荡器有望通过电极的小型化和柔性化进一步拓展应用范围,在新型智能机械系统和微型软机器人等领域展现出较大的前景。
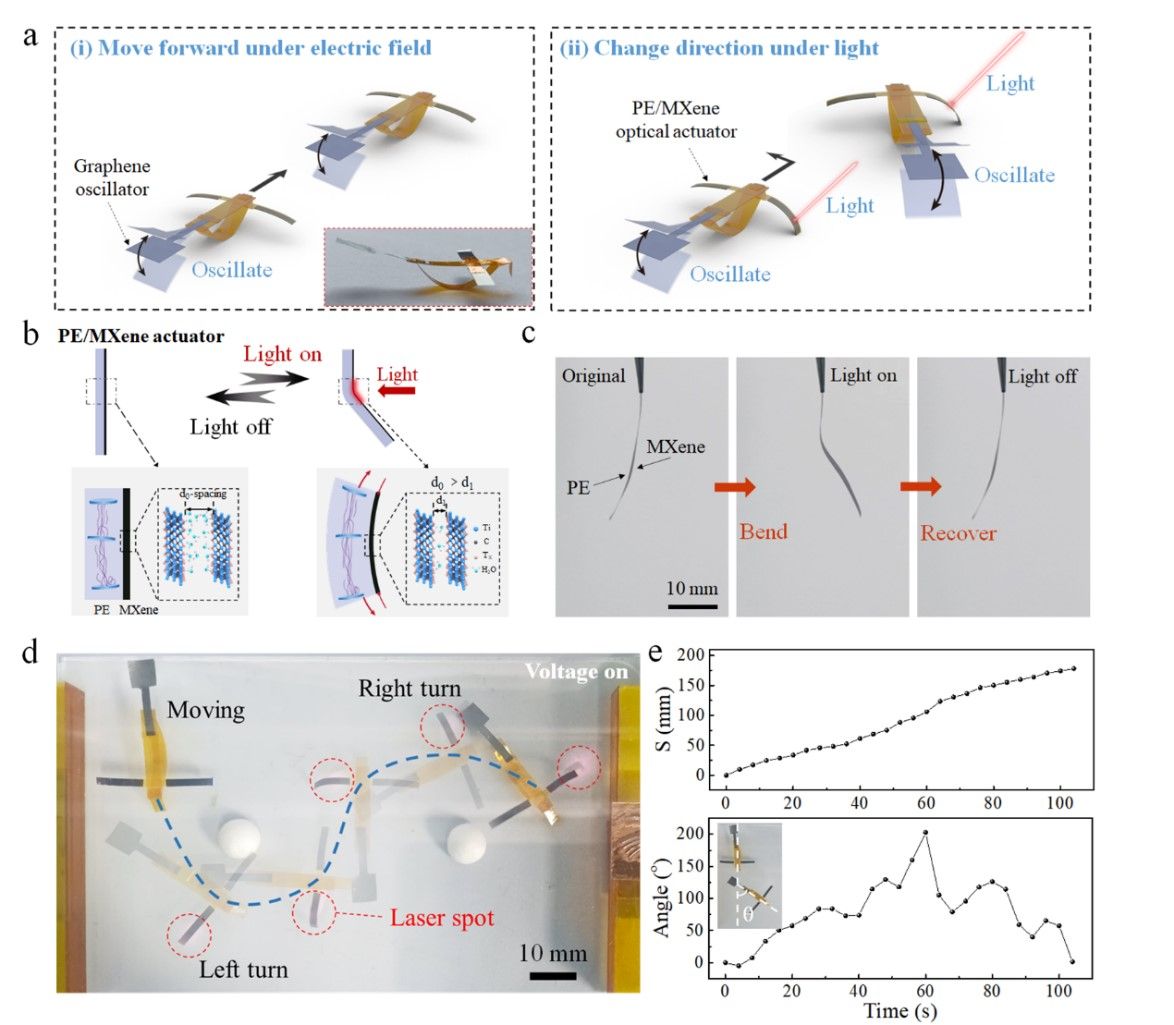
图4 光/电操控的仿海豹机器人及其可控运动
在柔性智能光驱动器的应用方面,该团队针对低频噪声污染的高效声衰减需求,与爱沙尼亚塔尔图大学等多单位合作,首次将光活性聚合物智能材料与声学超材料结合,提出了一种新型可编程光调制吸声体(LMA)的概念,其通过光响应柔性智能驱动材料实现了无束缚、超宽带声学调制。与几何结构固定、可调性有限的传统超材料不同,LMA可在紧凑构型中实现超材料结构转变与尺寸参数调节,从而在低强度光刺激下,实现对吸声特性的可编程控制。相关成果以“A programmable acoustic metamaterial: achieving untethered ultra-broadband modulation with photoactive structural transition”为题发表在《Materials Horizons》上。
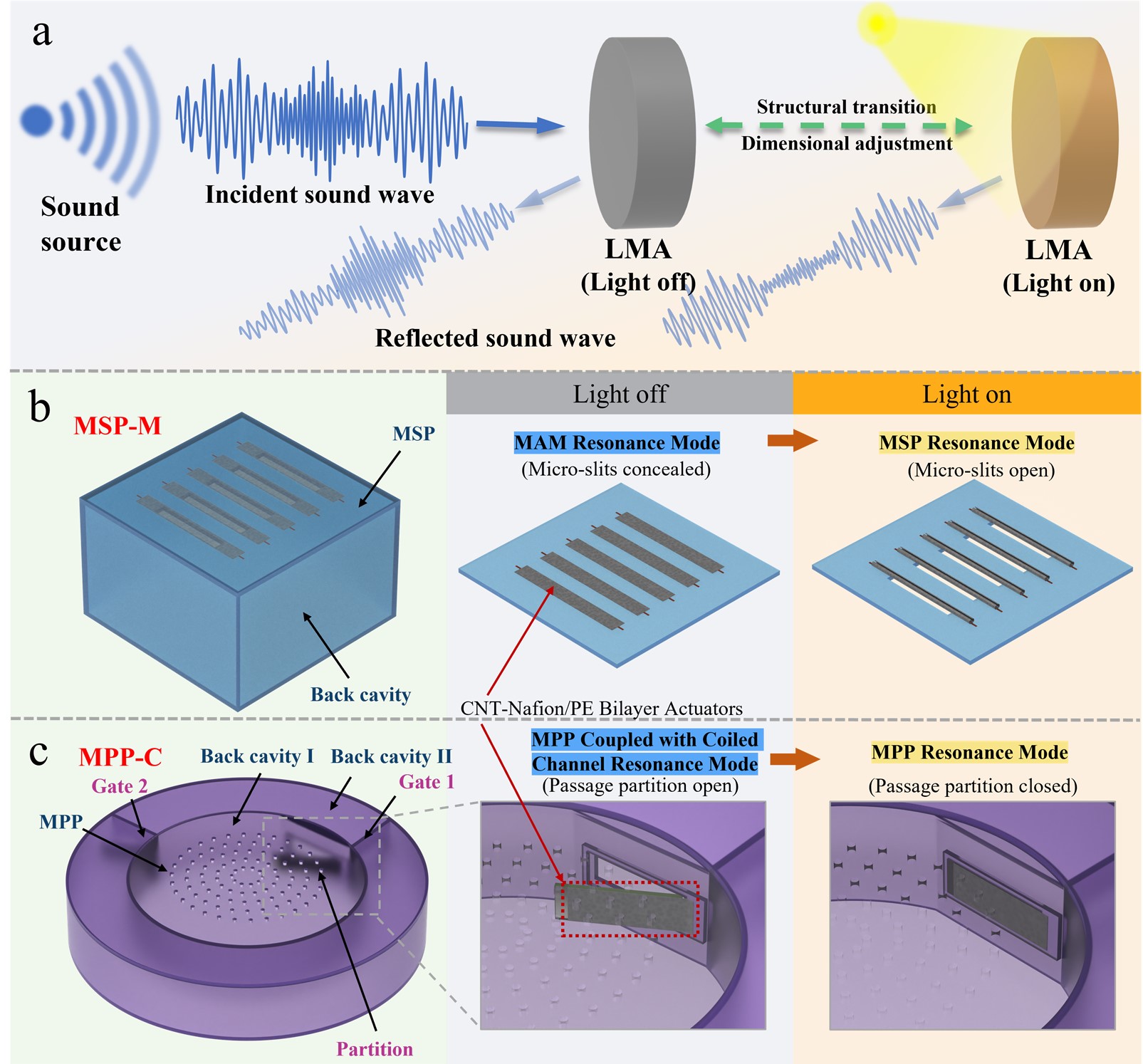
图5 LMA概念及两种LMA结构示意图
此外,该团队还与哈尔滨工业大学彭庆宇教授合作,开发了一种具有“类二极管式”变形行为的湿度响应MXene柔性薄膜驱动器。基于其厚度梯度结构以及MXene/羧甲基壳聚糖复合物对水分子的高度敏感性,该薄膜驱动器能够在水分梯度刺激下产生“类二极管式”的驱动变形行为,其变形行为与厚度梯度方向以及水分源的方向高度相关。当水分刺激复合膜底部时,薄膜的弯曲轴垂直于厚度梯度方向;当水分刺激复合膜顶部时,薄膜的弯曲轴平行于厚度梯度方向。基于该柔性驱动器独特的湿度响应行为,发展了一系列智能应用,包括水分梯度刺激下的柔性自振荡器件,以及基于人体代谢水分刺激的智能非接触开关、非接触键盘、可穿戴智能热管理服饰、可识别人体呼吸状态的自供电传感器等。相关成果以题为“MXene/Carboxymethyl Chitosan Moisture Responsive Soft Actuator with Diode-Like Actuation for Versatile Applications Driven by Human Metabolism”的论文发表在《Advanced Science》上。
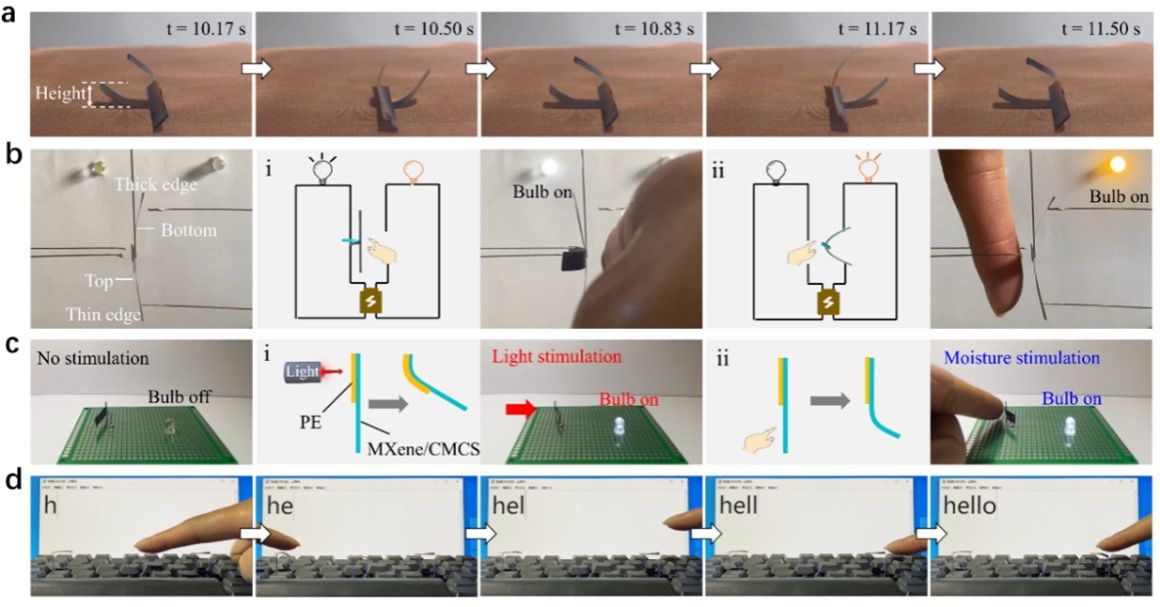
图6基于该复合膜驱动器的智能应用
上述研究工作得到了国家自然科学基金、中央高校基本科研业务费专项资金、安徽省自然科学基金等资助。
原文链接:https://doi.org/10.1002/adfm.202512768
https://doi.org/10.1039/D5MH01152C
https://doi.org/10.1002/advs.202507845
(胡颖/文 常龙飞/图 翟华/审核)
责任编辑:卫婷婷



